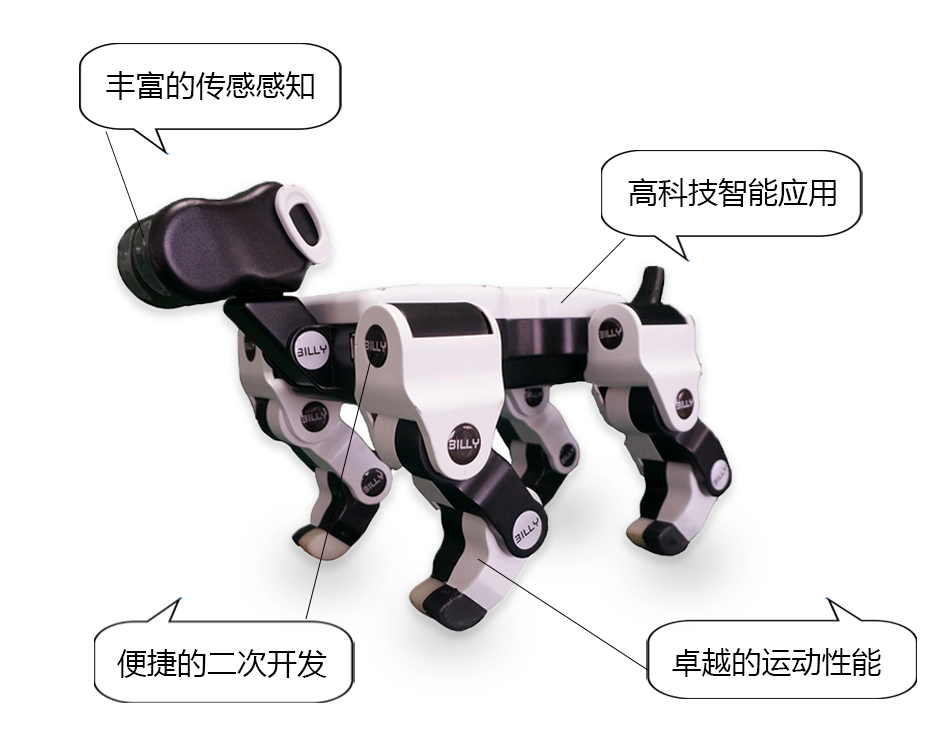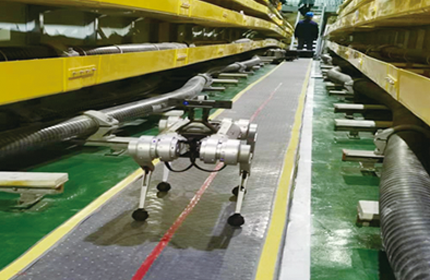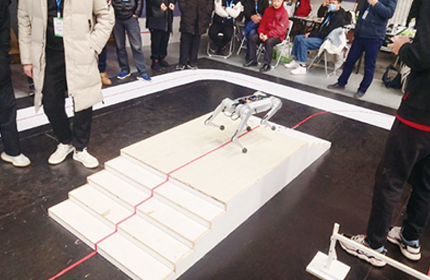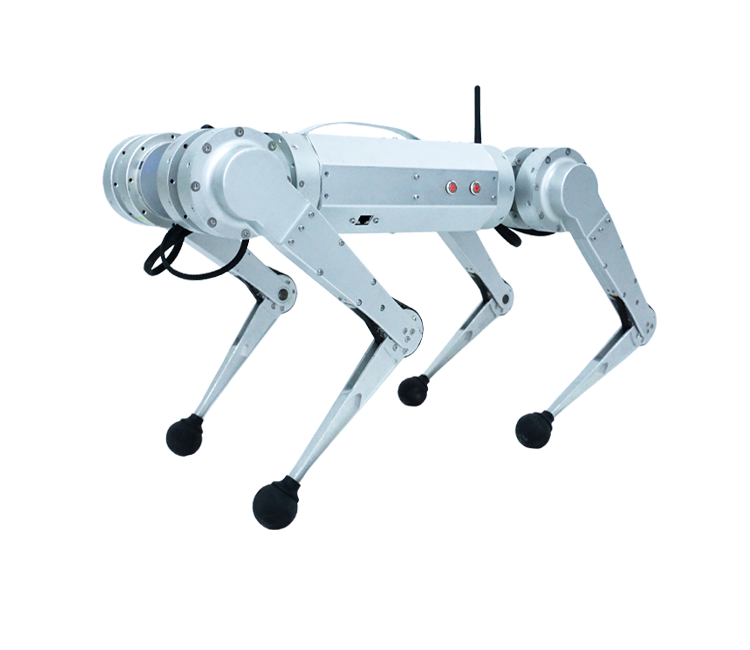

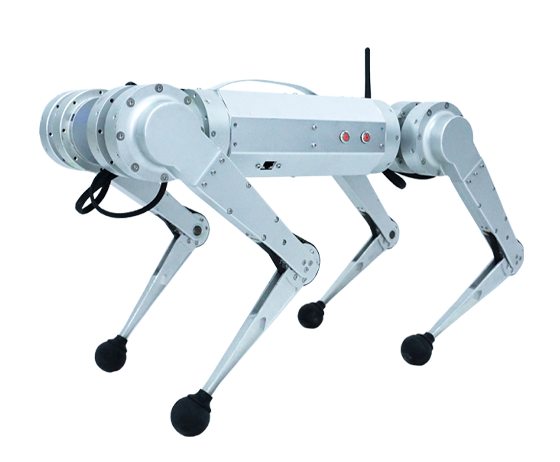
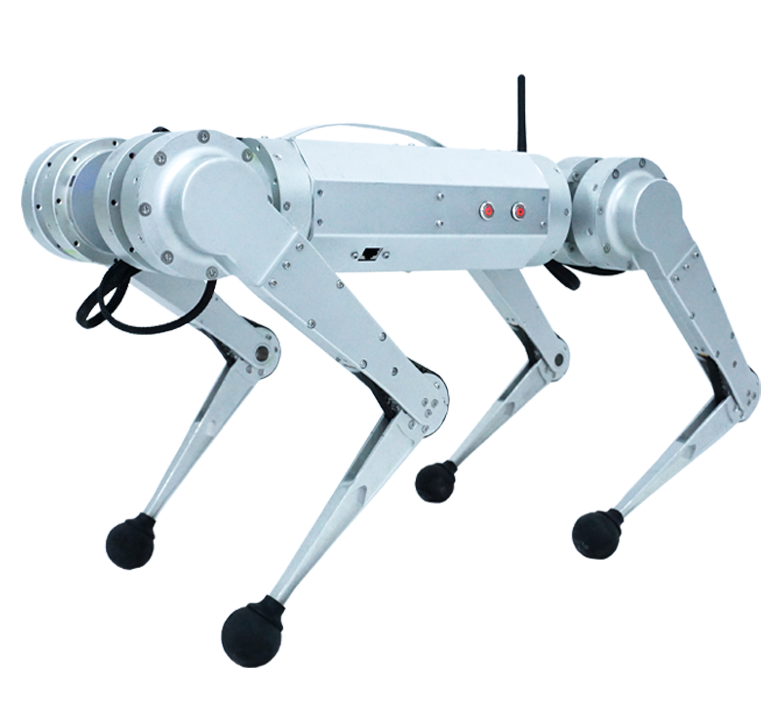
Strong athletic performance
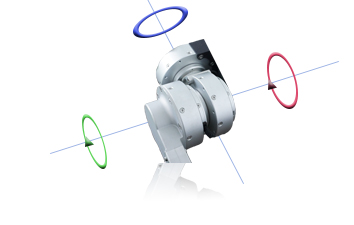
Servo motor
Integrated control circuit, brushless motor, planetary reducer
Extra large torque for more powerful action
Ultra high bandwidth torque control for more casual control




Servo motor
Integrated control circuit, brushless motor, planetary reducer
Extra large torque for more powerful action
Ultra high bandwidth torque control for more casual control
Joint driver centralized configuration
Smaller size and more flexible activities
Super strong structural rigidity

High strength belt drive
Reduce leg weight, ultra-low inertia
More efficient exercise

Modular design for drive, control, and execution
A more casual secondary development experience
Sandboxed free construction