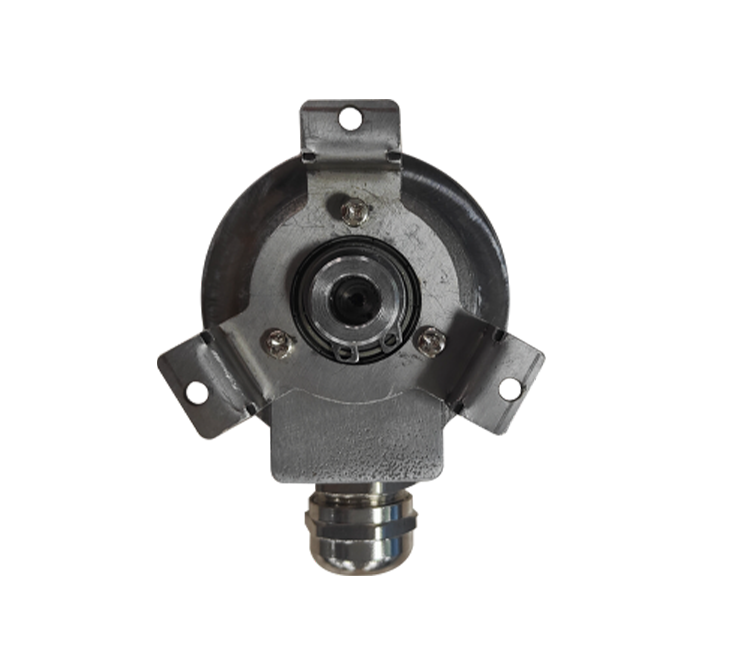
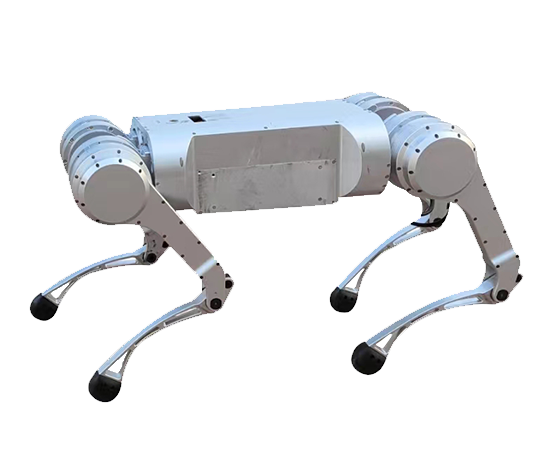
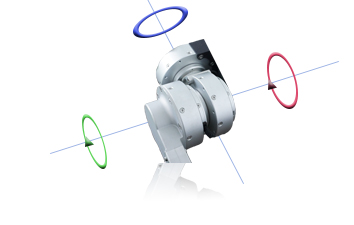
伺服电机
集成控制电路、无刷电机、行星减速器
超大扭矩,动作更强劲
超高带宽力矩控制,控制更随意
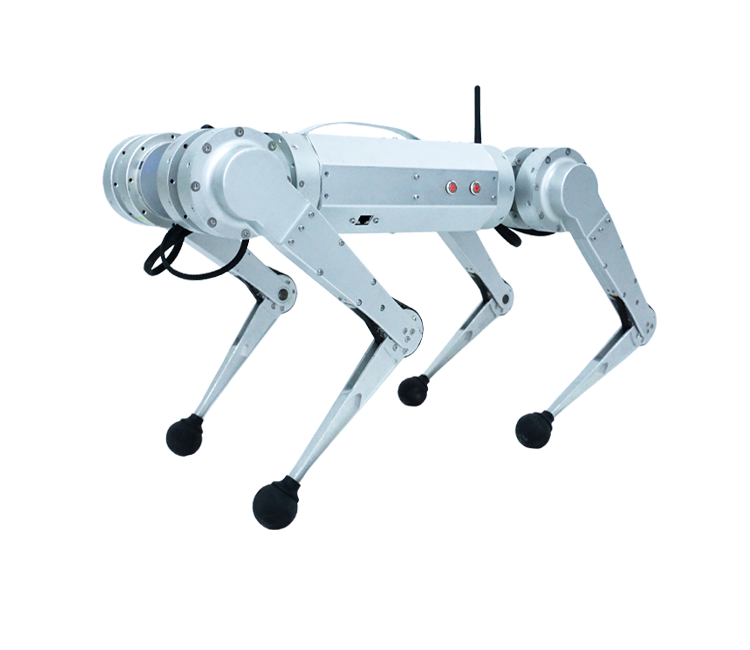
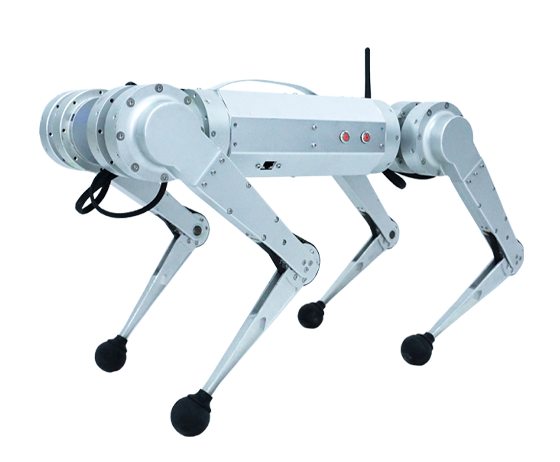
关节驱动器集中配置
体积更小,活动更灵活
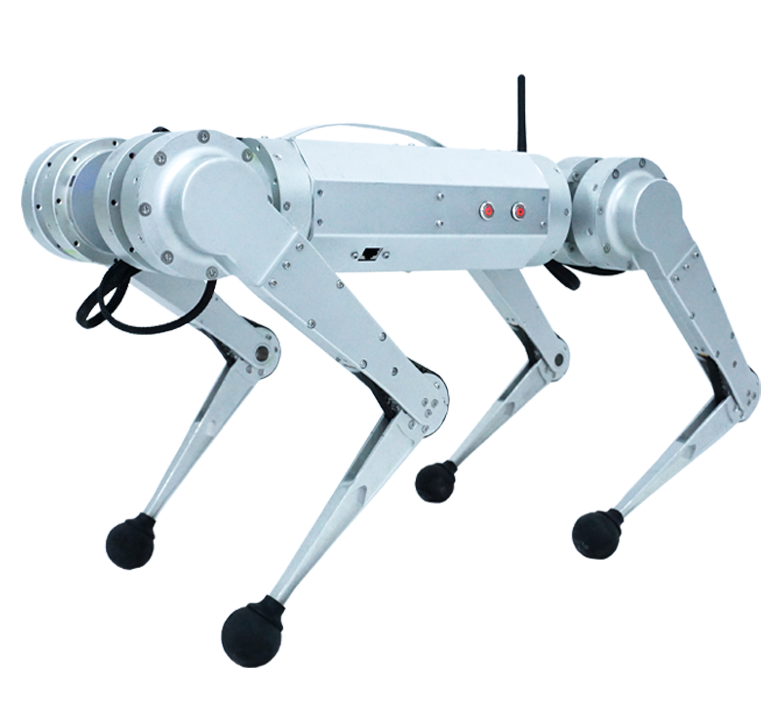
超强结构刚性
高强度皮带传动
减轻腿部重量,超低惯性
运动更高效
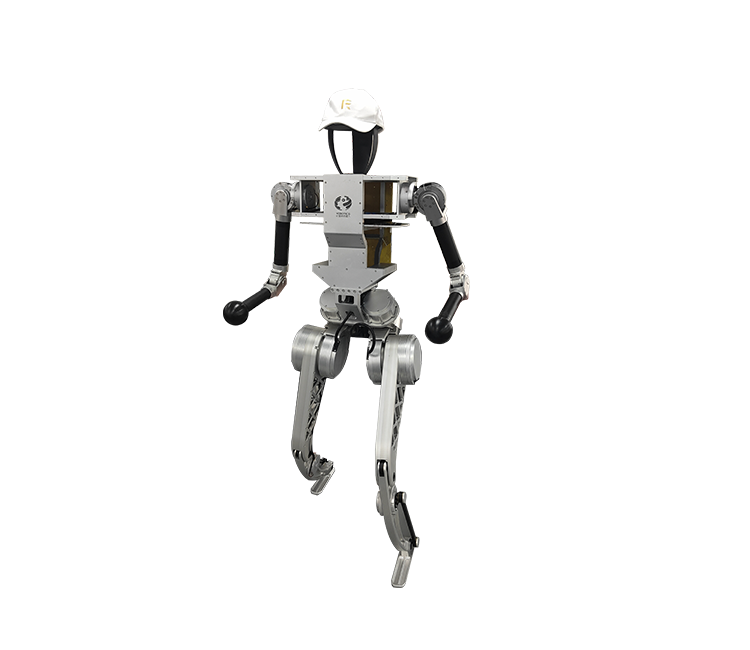
驱动、控制、执行模块化设计
更随心的二次开发体验
沙盒化自由搭建