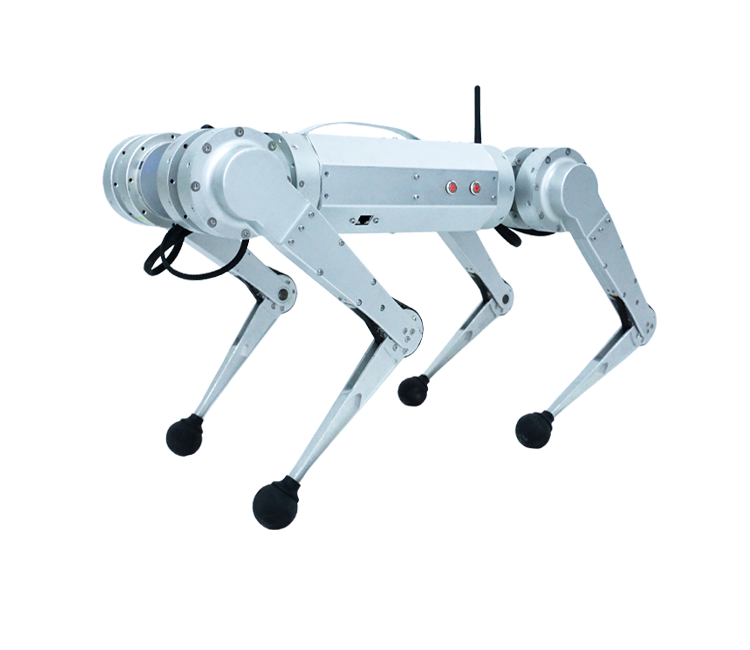
尺寸 | 485×275×300 (mm) | 重量 | 10.5 Kg (±0.5 Kg ) |
负载 | 5-8Kg | 爬坡角度 | 30° |
续航 | 80 min | ||
移动速度 | 前进速度:2 m/s | ||
自由度 | 12 (灵活,每腿3个自由度) | 材质 | 铝合金 (强度高,耐冲击) |
本体结构 | 准直驱行星减速结构 (大扭矩,高节能,平稳) | 执行器 | 高性能直流无刷电机 峰值24Nm |
核心板 | 英特尔凌动高配核心板 | 轴承 | 交叉滚子轴承 |
通信方式 | CAN总线 | 反馈控制频率 | 1kHz |
操作系统 | Linux | 惯性测量单元 | YOBOTICS高精度高性能IMU |
保护模式 | 过流、急停、过热保护 | 编程语言 | C,C++ |
功能 | 1、操作系统为Linux系统,PC机搭载仿真软件采用QT编写其界面程序,利用OpenGL库实现其物理仿真,利用C++编写其运动控制算法。编程语言支持C/C++等 2、配套仿真软件能对四足机器人做运动学、动力学、步态、步频、算法和控制模拟等 3、执行器采用双绝对式直流无刷伺服电机,一体化设计。电机可进行360°旋转,膝关节旋转角度可达270度,可断电位置记忆,支持CAN总线通讯方式,具备全局力控能力。 4、运动功能:行走、跑跳、快跑、跳跃,可前进、后退、左右移、蹲下、后空翻,同时具备抗外力扰动平衡控制能力,以及全局力控能力。 | ||
竞赛 | 支持中国机器人及人工智能大赛,中国机器人大赛等白名单赛事。 | ||