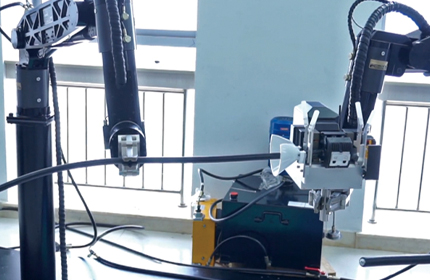


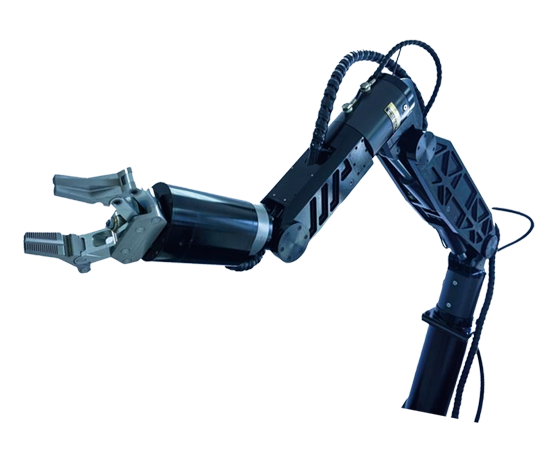
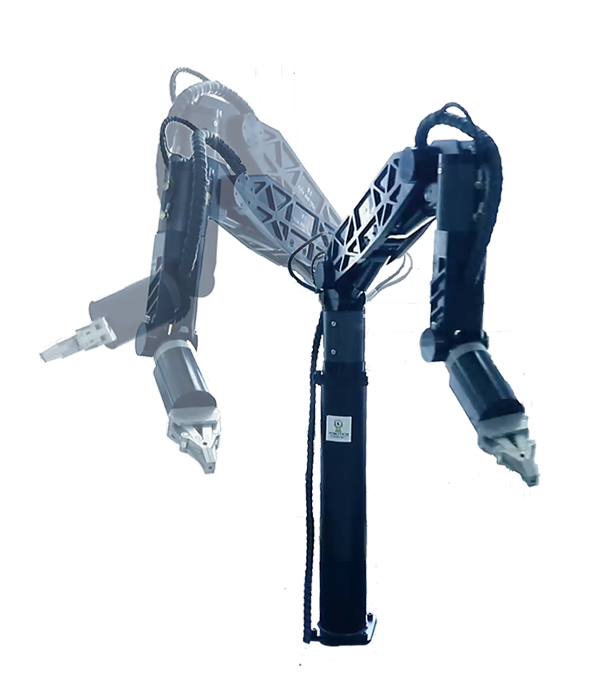
RoboArm液压机械臂
● 旋转关节×6 + 末端夹手
● 高精度
● 液压伺服驱动
● 负载自重比大于1
● 抗电磁干扰强
● 防护等级高





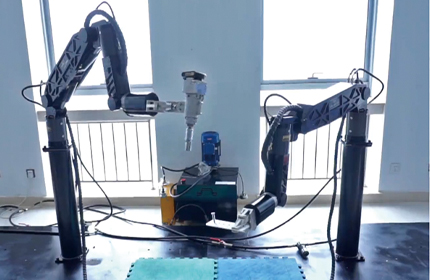
● 旋转关节×6 + 末端夹手
● 高精度
● 液压伺服驱动
● 负载自重比大于1
● 抗电磁干扰强
● 防护等级高
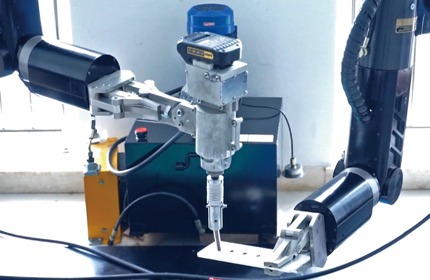
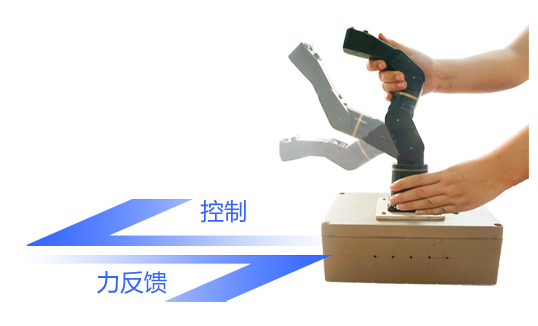
● 与机械臂同构
● 结构轻巧紧凑,方便携带
● 远距离控制机械臂的关节运动
● 根据机械臂端的工作负载大小
● 向操作者提供相应的临场力觉反馈
应用于复杂恶劣,或不适合作业人员直接进入的环境中,如:
● 带电作业场合
● 水下作业场合
● 矿井作业场合
● 核电作业场合 … …