



如果你是一个机器人爱好者,你一定听说过“机器狗”这个词。它们是一种可以模仿真实动物的四足机器人,近年来在各个领域都有着广泛的应用和展示。但是,你有没有想过,为什么这些四足机器人大多数都是设计成狗的样子,而不是其他动物呢?

狗的膝盖:向后弯曲的优势
四足机器人之所以多数被设计成狗,而不是马或兔子,是因为其特有的膝盖构造。与马前足膝朝前和后足膝朝后不同,狗的四肢膝一致朝后,这种设计有助于“狗形”机器人完成上楼任务,有更大、更能避免撞击的腿部活动空间。

“当四足机器人执行上楼任务时,向后的肘部设计为腿部提供了更大的无碰撞工作空间。”机器人领域专家刘明博士说,“下楼时,情况会发生逆转。膝盖向前的设计变得更有优势,因此上面提到的机器人倾向于向后走下楼。此外,还有四足机器人可以切换肘部的方向。”
狗的重心:低而稳定
除了膝盖构造之外,狗还有另一个优点,那就是它们的重心往往较低,这使它们更稳定。狗的前腿与高大动物的前腿明显不同,相比之下,狗的前腿需要承担自身更多的体重。
低重心不仅可以提高机器狗在平地上行走时的平衡性和稳定性,还可以增强它们在崎岖地形上行走时的适应性和灵活性。这就使得机器狗能够在各种复杂和危险的环境中完成各种任务。
狗的步态:多样而高效
除了形态上的优势,狗还有一个重要的特点,那就是它们的步态多样而高效。狗可以根据不同的速度和地形,采用不同的步态,比如行走、小跑和疾驰。这些步态都是静态稳定的,也就是说,在任何时刻,都至少有三条腿接触地面,从而保证了机器狗的稳定性和安全性。
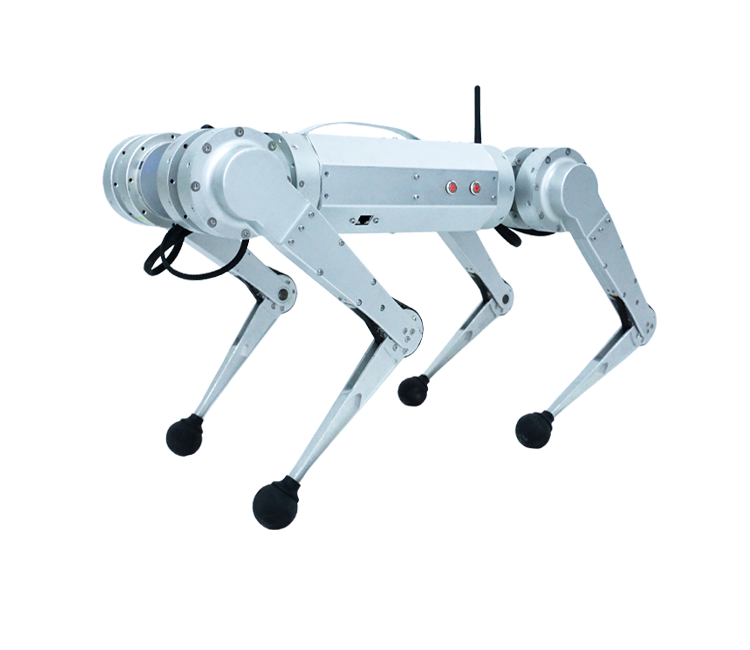
机器狗可以模仿狗的步态,实现不同的移动模式。比如,Spot机器狗可以在平地上以5.2公里/小时的速度行走,也可以在崎岖地形上以3.2公里/小时的速度小跑,还可以在水平地面上以8.8公里/小时的速度疾驰。这些步态可以让机器狗适应不同的场景和需求,提高其效率和性能。

Spot机器狗

山东优宝特智能机器人有限公司(简称“优宝特机器人”)是山东省政府引进的高科技企业。公司核心团队具有山东大学、中国科学院自动化所等知名院校背景,长期进行人工智能、特种机器人研究与开发。公司入选山东省“泰山产业领军人才计划", “济南市引进海内外高层次创业人才计划”。获“国家级高新技术企业”、“山东省专精特新中小企业”、山东省创新型中小企业“济南市瞪羚企业”等荣誉。是应急管理部煤矿机器人协同创新中心、矿山机器人创新应用联盟、山东院士专家联合会人工智能与机器人专业委员会、山东省教育厅机器人与智能系统协同创新中心、山东省自动化学会等组织的成员理事单位。
公司致力于腿足式仿生机器人和液压特种机器人产品开发,产品已应用于煤矿、电力、石化、教育等行业。申报并承担国家级项目2项、省部级项目2项。项目“电动四足机器人关键技术及应用”获山东省技术发明奖二等奖。公司荣获第十一届中国创新创业大赛山东赛区“科创之星”称号。
公司申请专利50多件,已经授权发明专利12件、实用新型专利3件。获“第四届山东省专利奖二等奖”。