×
全站搜索
立即搜索
×
提示信息:
确认
首 页
关于我们
产品中心
行业应用
服务支持
新闻资讯
首页
home
关于我们
About Us
企业简介
企业文化
发展历程
荣誉资质
联系我们
产品中心
Product Center
四足机器人系列
液压机械臂系列
人形机器人
液压机器人核心部件
机器人关节模组
行业应用
Industry Application
电力巡检
应急救援
智慧矿山
教育科研
服务支持
Service
新闻资讯
News Center
企业简介
企业文化
发展历程
荣誉资质
联系我们
电力巡检
应急救援
智慧矿山
教育科研
四足机器人系列
液压机械臂系列
人形机器人
液压机器人核心部件
机器人关节模组
下载中心
售后服务
企业新闻
行业动态
视频资讯
首页
关于我们
企业简介
企业文化
发展历程
荣誉资质
联系我们
产品中心
四足机器人系列
液压机械臂系列
人形机器人
液压机器人核心部件
机器人关节模组
行业应用
电力巡检
应急救援
智慧矿山
教育科研
服务支持
新闻资讯
企业新闻
行业动态
视频资讯
电力巡检
优宝特机器人推动产业结构优化升级,助力产业智能化转型
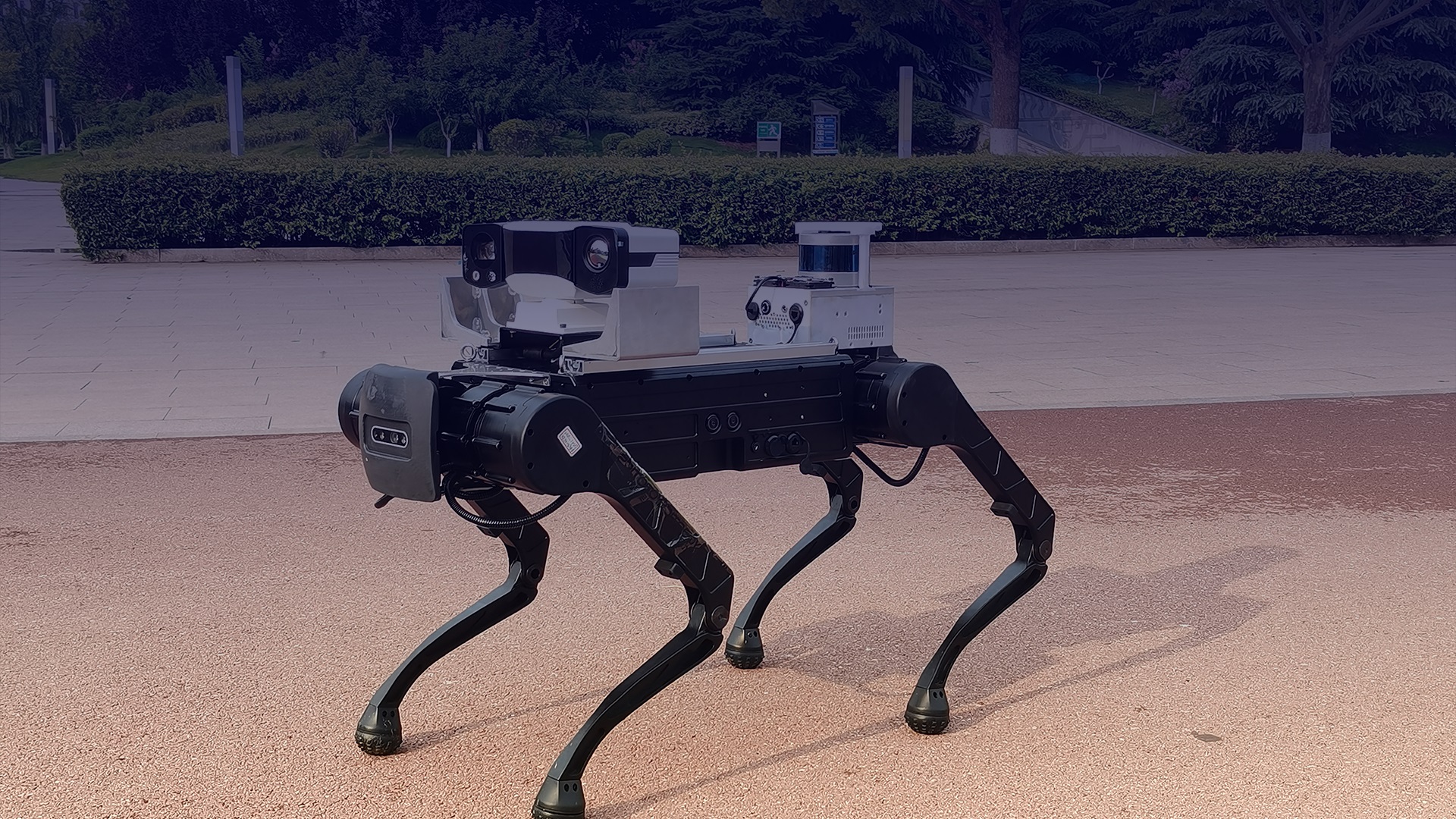
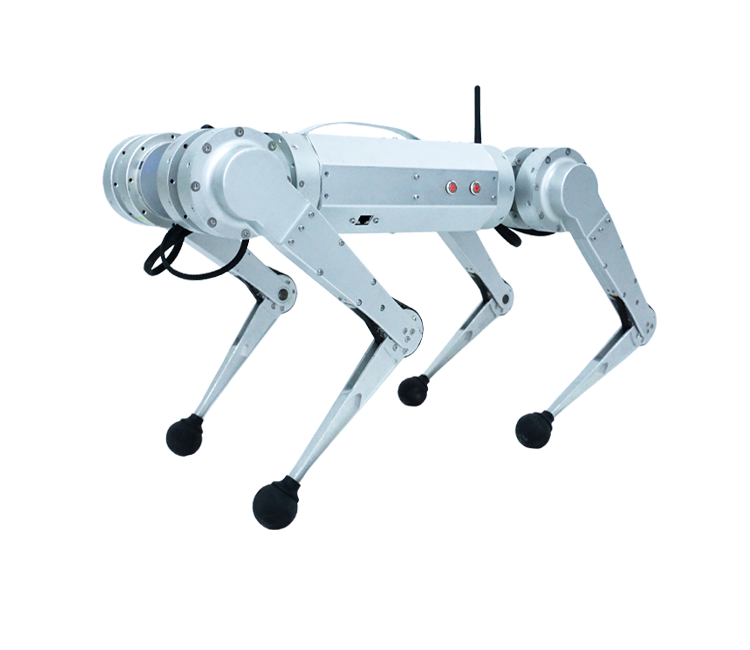
四足机器人
Y20可用于电力巡检,是一款高动态性能的四足机器人,配备优宝特在步态规划、腿足控制、环境感知方面的先进技术,是商用、教育、科研四足机器人领域的旗舰产品,提供丰富的二次开发接口(USB、Ethernet、串口、CAN等)。
模块化
Y20采用模块化整机设计思路,将驱动、控制、执行模块化,精心打造各个模块;
高性能
搭载高性能执行器,超大扭矩,动作更强劲,超高带宽力矩控制使控制更随意;
更灵活
采用紧凑结构设计,关节驱动器集中配置体积更小,活动更灵活;
更高效
低惯量腿足设计,减轻腿部重量,超低惯性运动更高效;
更稳定
运动控制算法升级,多步态,抗冲击,自适应地形,运动更加稳定。
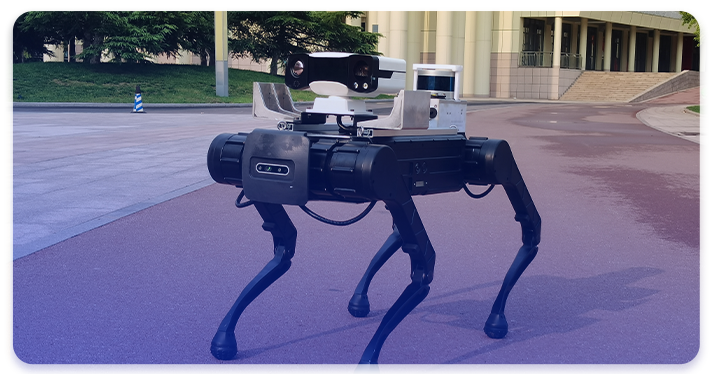
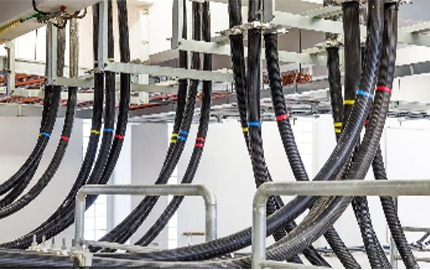
跨越复杂地形
Y20在管廊隧道环境下实现电力巡检。
Y20高带宽力矩控制使关节活动空间更大,运动灵活性更好,采用抗外力扰动平衡控制, 抗扰能力强,在一定的外力干扰下,可恢复自身平衡。Y20最大可负载40KG,无负载情 况下可实现续航2h,能够攀爬坡度为35°的斜坡,静步态上下台阶高度超过38cm,动步 态上下楼梯高度大于15cm,能在斜坡、楼梯等地形上稳定运动,具备卓越的地形适应能力。
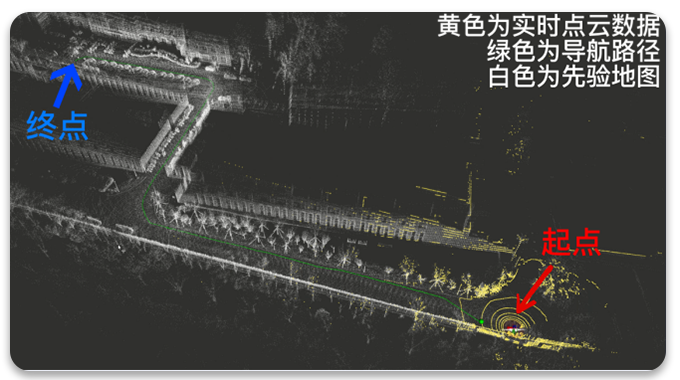
自主定位导航
Y20搭载YoboSLAM系统,具有精准的环境感知能力以及智能的规划、交互能力,可应用于 如工厂、园区、变电站等重要场所的例行检查和定点巡查。YoboSLAM系统集环境感知与导 航定位为一体,拥有自主研发的里程计、高精度建图算法和自主导航技术,具备多种地形环 境下的高精度地图构建、自主定位导航以及巡检的能力。
拓展能力
Y20拥有强大的拓展能力,可定制搭载激光雷达、双目深度相机、RTK模块、机械臂等设备,综合应用大数据等技术手段,可实现实时环境信息的采集与上传,实现厂站全天候、全区域、全自主巡检和各类设施、设备以及环境信息的全覆盖检测,实现安防巡检、探索探测、专业巡检等应用。Y20电力巡检解决方案拥有强拓展能力,助力推动电力巡检产业转型升级,实现巡检智能化,为产业高质量发展提供新动力,实现高精度数据采集、实时数据上传、精细化巡检等高效巡检功能。