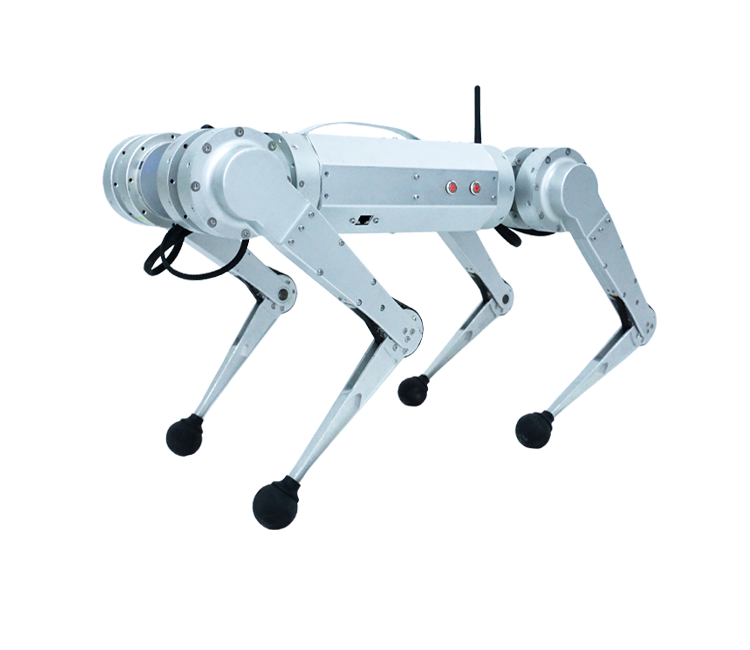
四足机器人
Y20可用于应急救援,高带宽力矩控制使关节活动空间更大,运动灵活性更好,采用抗外力扰动平衡控制,抗扰能力强,在一定的外力干扰下,可恢复自身平衡。Y20最大可负载40KG,无负载情况下可实现续航2h,能够攀爬坡度为35°的斜坡,静步态上下台阶高度超过38cm,动步态上下楼梯高度大于15cm,能在草地、雪地、沙石地等多种地形上稳定运动,具备卓越的地形适应能力
-
模块化
Y20采用模块化整机设计思路,将驱动、控制、执行模块化,精心打造各个模块;
-
高性能
搭载高性能执行器,超大扭矩,动作更强劲,超高带宽力矩控制使控制更随意;
-
更灵活
采用紧凑结构设计,关节驱动器集中配置体积更小,活动更灵活;
-
更高效
低惯量腿足设计,减轻腿部重量,超低惯性运动更高效;
-
更稳定
运动控制算法升级,多步态,抗冲击,自适应地形,运动更加稳定。